直流电动机就是利用直流电压工作的电动机,常见的直流电动机包括有刷直流电动机、无刷直流电动机、步进电动机三种。常见的直流电动机如图1所示。
提示:有刷直流电动机对外只有两条引出线,步进电动机多有五条引出线,而无刷直流电动机的引出线通常要超过五条。
1.有刷直流电动机
(1)特点
有刷直流电动机就是采用了电刷(俗称炭刷>的直流电动机。有刷直流电动机是靠整流子(俗称换向器)和电刷配合来实现电流极性的交替转换,自动完成换向(相),换向器和电刷装在电动机内部。有刷电动机又分为高速和低速两种。
提示:有刷电动机最大的优点是驱动电路简单,过载能力强,容易控制,而它的主要缺点是成本较高,故障率高,维修难度大。
(2)工作原理
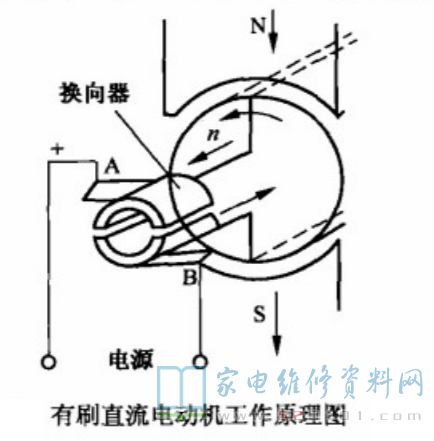
参见图2,有刷直流电动机的定子,上安装了永久磁铁(磁钢),由它构成主磁极N和s,在转子.上安装了电枢铁芯和绕组,绕组的两端接换向器的铜片,再通过铜片与电刷相接。由于控制器输出的驱动电压加到电刷正、负极,所以当换向器的条状铜片交替与电刷的正、负极接触时,绕组就能通过换向器得到交替变化的导通电流,使绕组产生不同方向的电动势,从而产生交变磁场,吸引转子旋转。
电动机绕组两端电压越高,磁场强度越大,转子转动的转矩也越大,电动机的转速也就越快,反之则结果相反。因此,通过调整绕组两端所加电压大小就可实现电动机转速的调整,而改变绕组的供电方向可改变电动机的旋转方向。
2.无刷直流电动机
(1)特点
无刷直流电动机就是未采用电刷的电动机。为了实现换向,无刷电动机采用了三极管和位置传感器(霍尔元件)代替电刷和换向器。由于此类电动机取消了电刷和换向器,所以不仅消除了电磁干扰和降低了机械噪声,而且延长了使用寿命。但此类电动机的控制器(电动机驱动、控制电路)比较复杂,增大了成本,并且低速启动时轻微抖动。
(2)工作原理
无刷直流电动机的工作原理是通过给两相绕组通电使它产生一定的磁场。 由于磁通具有走最短路径的特点,转子和定子的相对位置发生了变化。当按照一定的顺序为不同两相绕组供电时,则可使电动机内部的磁场旋转起来,从而使电动机转动。电动机通电顺序不同,电动机转动的方向也就不同。
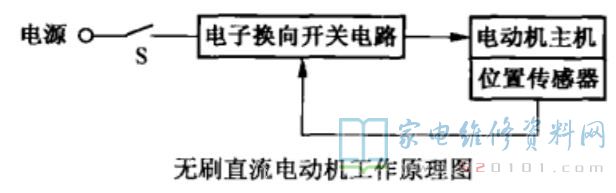
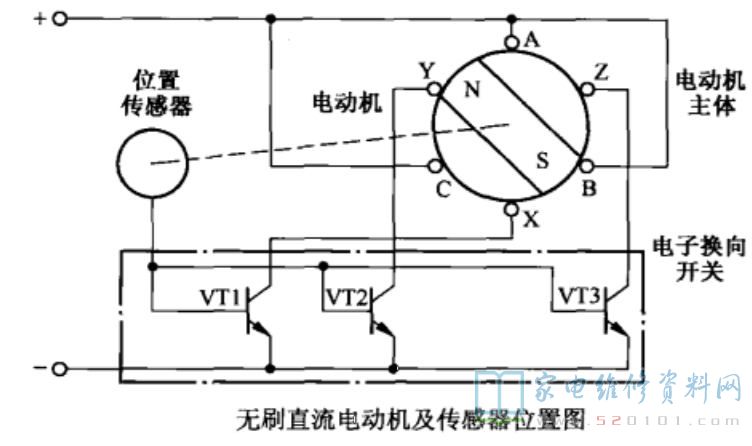
参见图3、图4,无刷直流电动机由电动机主体、位置传感器及电子换向开关电路三个基本部分组成。其中位置传感器的定子和电子换向开关电路相当于一个静止的换向器,与位置传感器旋转着的“电刷”一起组成一个没有机械接触的电子换向装置。
电枢绕组分别与相应的电子换向开关电路连接。为了保持电枢绕组电流与磁场极性的相对关系不变,设有检测转子位置的传感器,使电枢绕组能随转子位置变化依次通电。
位置传感器是一种无机械接触的检测转子位置的装置,由传感器定子和转子构成,分别装在定子机壳内和转子轴上,由它提供的信号通过控制器内的解码器处理后,再通过放大器放大后就可按一定顺序触发电子换向开关电路。目前,无刷直流电动机常用的传感器定子为霍尔传感器,传感器的转子为永磁体。
电子换向开关电路中各功率元件分别与相应的各相定子绕组串联,各功率元件的导通与截止取决于位置传感器的检测信号。绕组电路的导通可以是一相一相依次导通,也可以是两相两相依次导通。
当电动机绕组两端电压很高,使磁场强度增大时,转子转动的转矩也越大,电动机的转速也就越快,反之则结果相反。因此,通过调整绕组两端所加电压的大小就可实现电动机转速的调整。当主转子N极在定子Y位置时,垂直换向传感器将产生X方向上的电动势,此信号使电子换向开关导通,与其串联的定子X绕组中将有电流流过,并使定子X极磁化为S极,以吸引转子旋转90°,N极到达定子X位置,此时垂直换向传感器输出为0,水平换向传感器将产生Y方向电动势,并使定子Y极磁化为S极,以吸引转子继续旋转90°。因此,对于不同的主转子位置,换向传感器依次输出不同信号,使主定子绕组按X->Y->Z->X->Y的循环顺序轮流通电,形成旋转磁场,吸引转子旋转。
相关连接:无刷直流电动机的磁钢数量一般是12片、16片或18片,其对应的定子槽数是36槽、链接48槽或54槽。电动机在静止状态时,转子磁钢的磁力线有沿磁阻最小方向行走的特性,因此转子磁钢所停顿的位置恰好为定子槽凸极的位置。磁钢不会停在定子槽心的位置,这样转子与定子的相对位置只有36种、48 种或54种这有限的几个位置。因此无刷直流电动机的最小磁拉力角就是(360/36)°、(360/48)°。或(360/54)°。霍尔组件通常安装在转子有引线一端,并靠近定子磁钢的地方。
3.步进电动机
步进电动机是将脉冲信号转变为角位移或线位移的开环控制元件。由于步进电动机在非超载的情况下,它的转速、停止的位置只取决于脉冲信号的频率,而不受负载变化的影响,因此,许多室内机的摆风电动机采用步进电动机。步进电动机通常有五根引出线,其中红线为12V电源线,其他四根是脉冲驱动信号输入线。
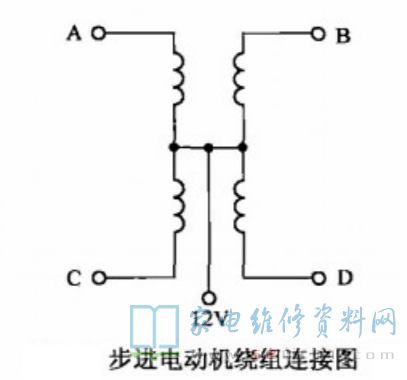
参见图5, 电脑板通过A、B、C、D四个端子为步进电动机的绕组输入不同的相序驱动信号后,绕组产生的磁场可以驱动转子正转或反转,而改变驱动信号的频率时可改变电动机的转速,频率高时电动机转速快,频率低时电动机转速慢。
网友评论